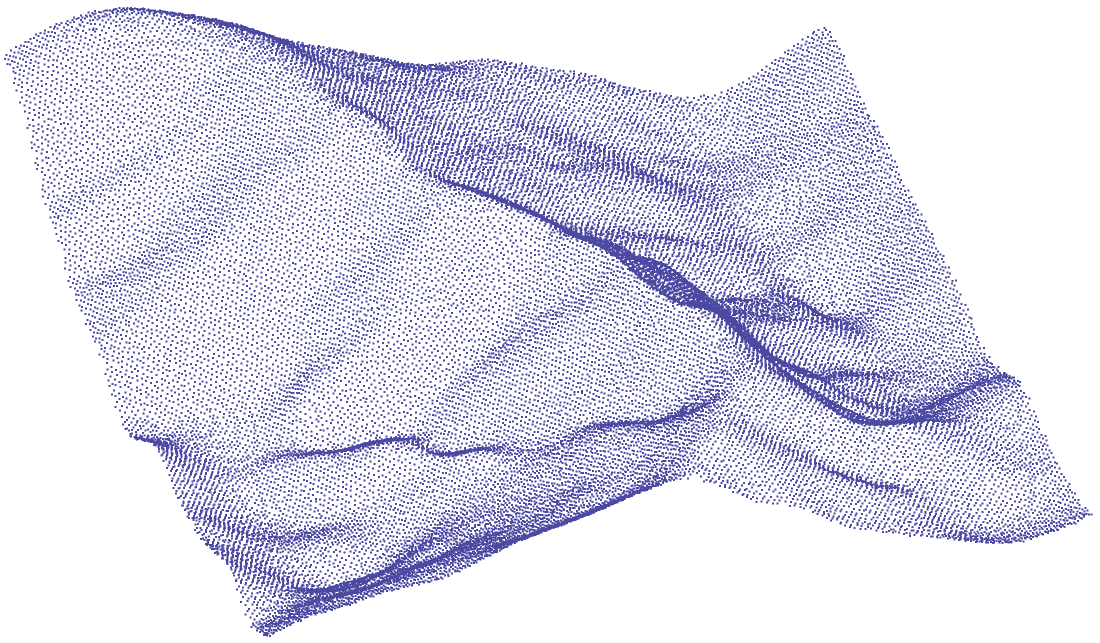
PointSet¶
Transfering LIDAR point-cloud data from surveying software into 3D modelling software packages.
Element¶
-
class
omf.pointset.PointSetElement(**kwargs)[source]¶ Contains mesh, data, textures, and options of a point set
Required Properties:
- color (
Color): Solid color, a color, Default: random - description (
String): Description, a unicode string - geometry (
PointSetGeometry): Structure of the point set element, an instance of PointSetGeometry - name (
String): Title, a unicode string - subtype (
StringChoice): Category of PointSet, any of “point”, “collar”, “blasthole”, Default: point
Optional Properties:
- data (a list of
ProjectElementData): Data defined on the element, a list (each item is an instance of ProjectElementData) - textures (a list of
ImageTexture): Images mapped on the element, a list (each item is an instance of ImageTexture)
Other Properties:
- date_created (
GettableProperty): Date project was created - date_modified (
GettableProperty): Date project was modified - uid (
Uuid): Unique identifier, a unique ID auto-generated with uuid.uuid4()
- color (
Geometry¶

-
class
omf.pointset.PointSetGeometry(**kwargs)[source]¶ Contains spatial information of a point set
Required Properties:
- origin (
Vector3): Origin of the Mesh relative to origin of the Project, a 3D Vector of <type ‘float’> with shape (3), Default: [0.0, 0.0, 0.0] - vertices (
Vector3Array): Spatial coordinates of points relative to point set origin, an instance of Vector3Array
Other Properties:
- date_created (
GettableProperty): Date project was created - date_modified (
GettableProperty): Date project was modified - uid (
Uuid): Unique identifier, a unique ID auto-generated with uuid.uuid4()
- origin (
Textures¶
Textures are ImageTexture mapped to the PointSets.